
Coaxial Drones
a better alternative to quadrocopters?

I’ve been interested in aircraft since I was a child. Been a member of local AeroClub where we built and competed in free flight, F1A gliders. That’s unpowered and uncontrolled models that once in the air are controlled by how you set it up beforehand, no radio control here.

Later, when radio-controlled devices became more accessible we transitioned to RC planes and sub 100Mhz radios, unlike today’s 2.5Ghz ones. Members of that club created the first recon drone in 1993 which was used in the Croatian War of Independence. I remember being there while it was built, and it was built fast, no finesse is needed for such a “large” model, and a striped down chainsaw (or was it a lawnmower, cant remember) engine.

Back to the topic.
What are Coaxial drones and what makes them so much better than “traditional” quad engine design? Even NASA thought so.
Traditional coaxial helicopters were extremely complicated and had a lot of potential points of failure. Nevertheless, The coaxial rotor setup contributes to improved flight efficiency and extended flight times. The counter-rotating rotors create a balanced torque effect, minimizing the need for energy-consuming mechanisms to counteract it. As a result, coaxial helicopters can operate at lower power consumption levels, allowing for longer flight durations. So, there was a lot of effort put into developing a practical coaxial helicopter setup but the mechanical complexity kept that from becoming commercial success.

By reducing the coaxial setup to a drone platform, we can dramatically reduce complexity. Instead of four individual motors, we only have two, which also reduces the number of Electronic Speed Controllers (ESC). All of this helps to reduce weight.

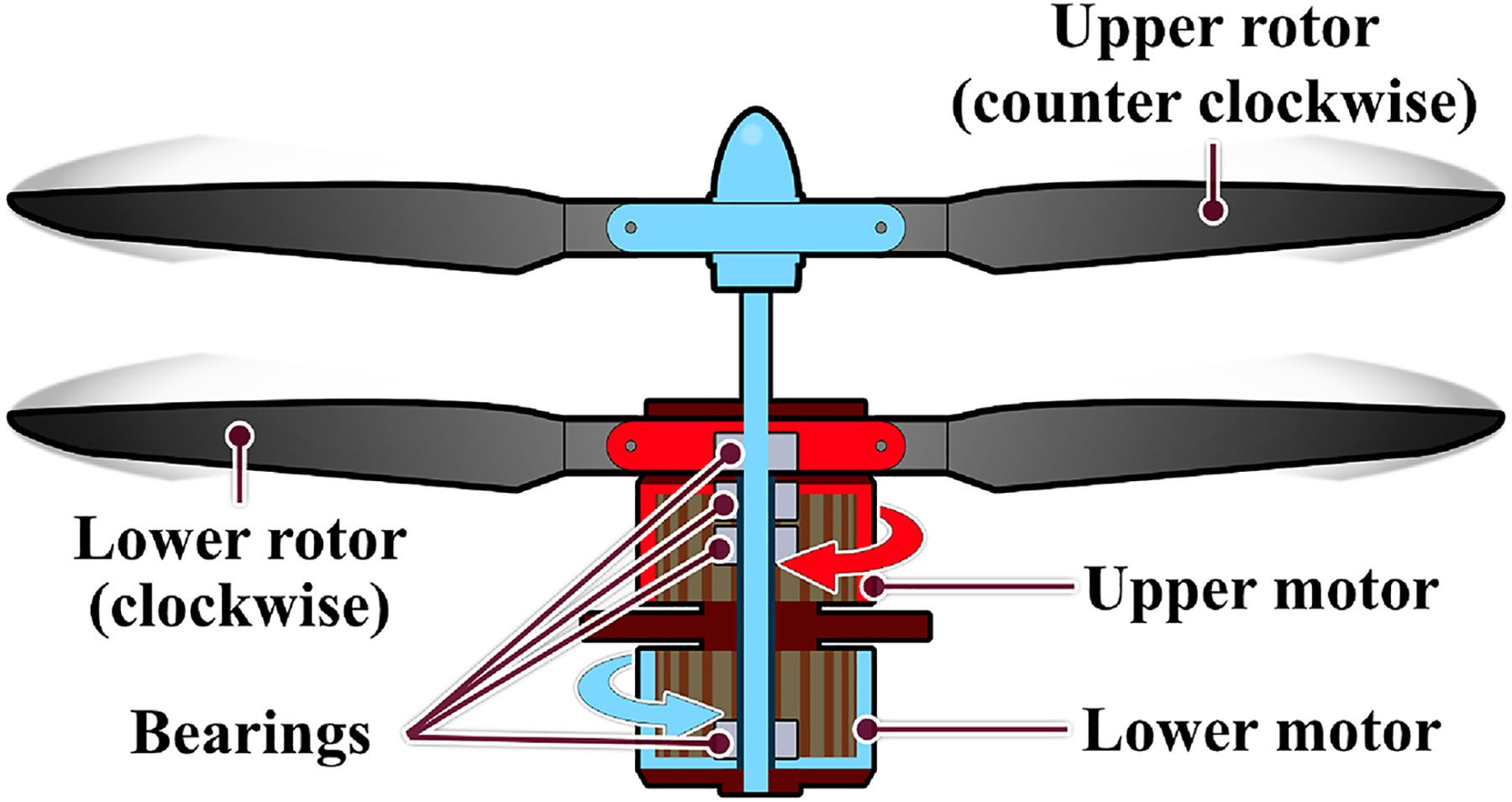
Now, what about the complexity of control? Due to reduced size and the inherent motor setup, we can actually completely remove the control mechanism and just stack two motors with coaxial shafts connecting them and use the shift the Centar of Gravity to move the drone. While it is true that quadrocopters will enjoy much more maneuverability over coaxial with this setup of coaxial drones but for most applications it does not matter, only where I could envision a huge difference is for high-speed acrobatic drones or drone races.
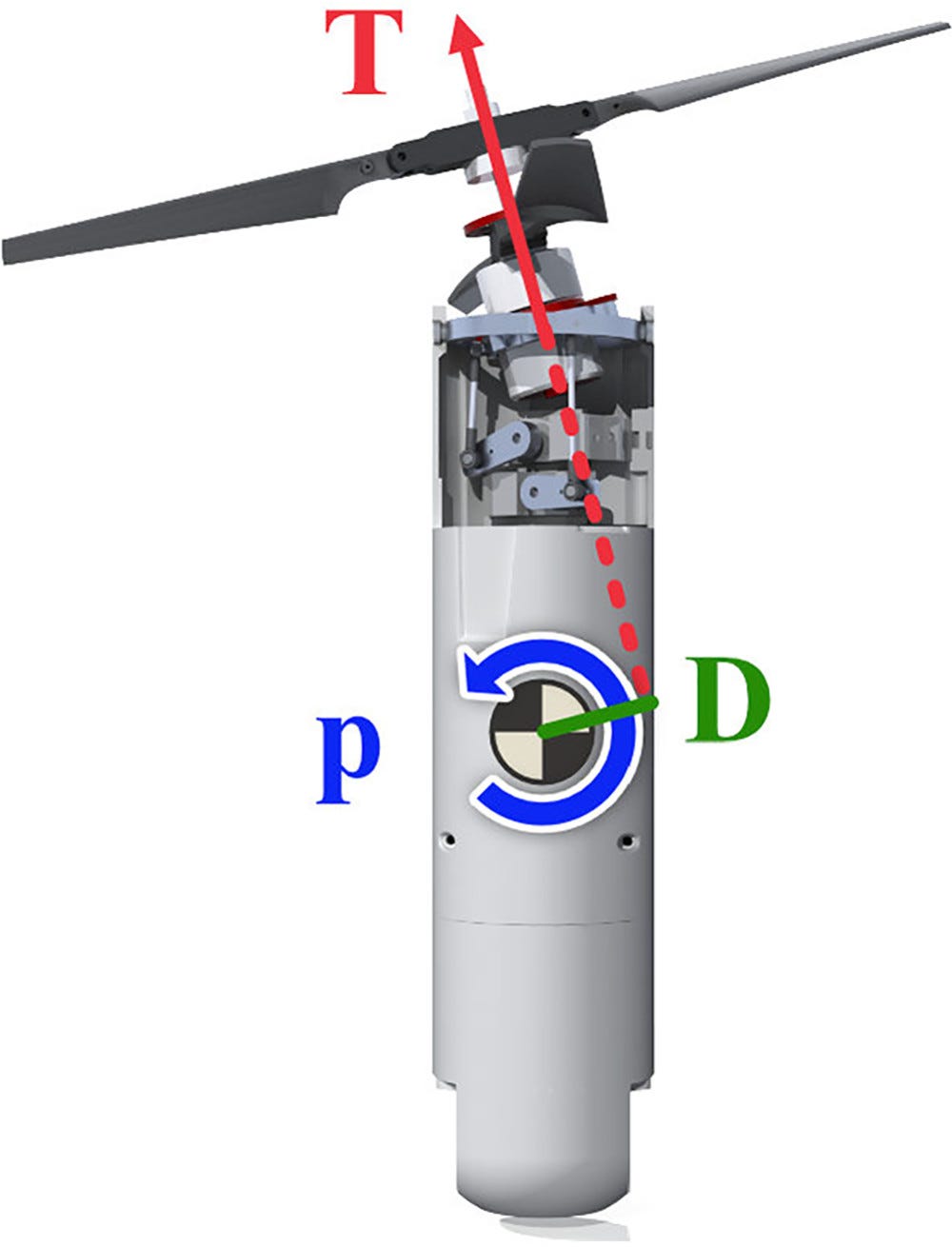
One simple way to change the Center of Gravity is to change the angle of the coaxial setup by placing the motors in a gimble and moving the setup using servo motors. The best overview of the basics can be seen in the International Journal of Micro Air Vehicles article about the Design, development, and flight testing of a tube-launched coaxial-rotor based micro air vehicle.
Tilting the rotors is not the only way to change the center of gravity of the drone. You can move weights within the drone as it was proposed in the paper about the Development and Testing of a Coaxial Helicopter Controlled by Shifting the Center of Gravity. But I find that wasteful in terms of weight, removing weight and then just adding it back.
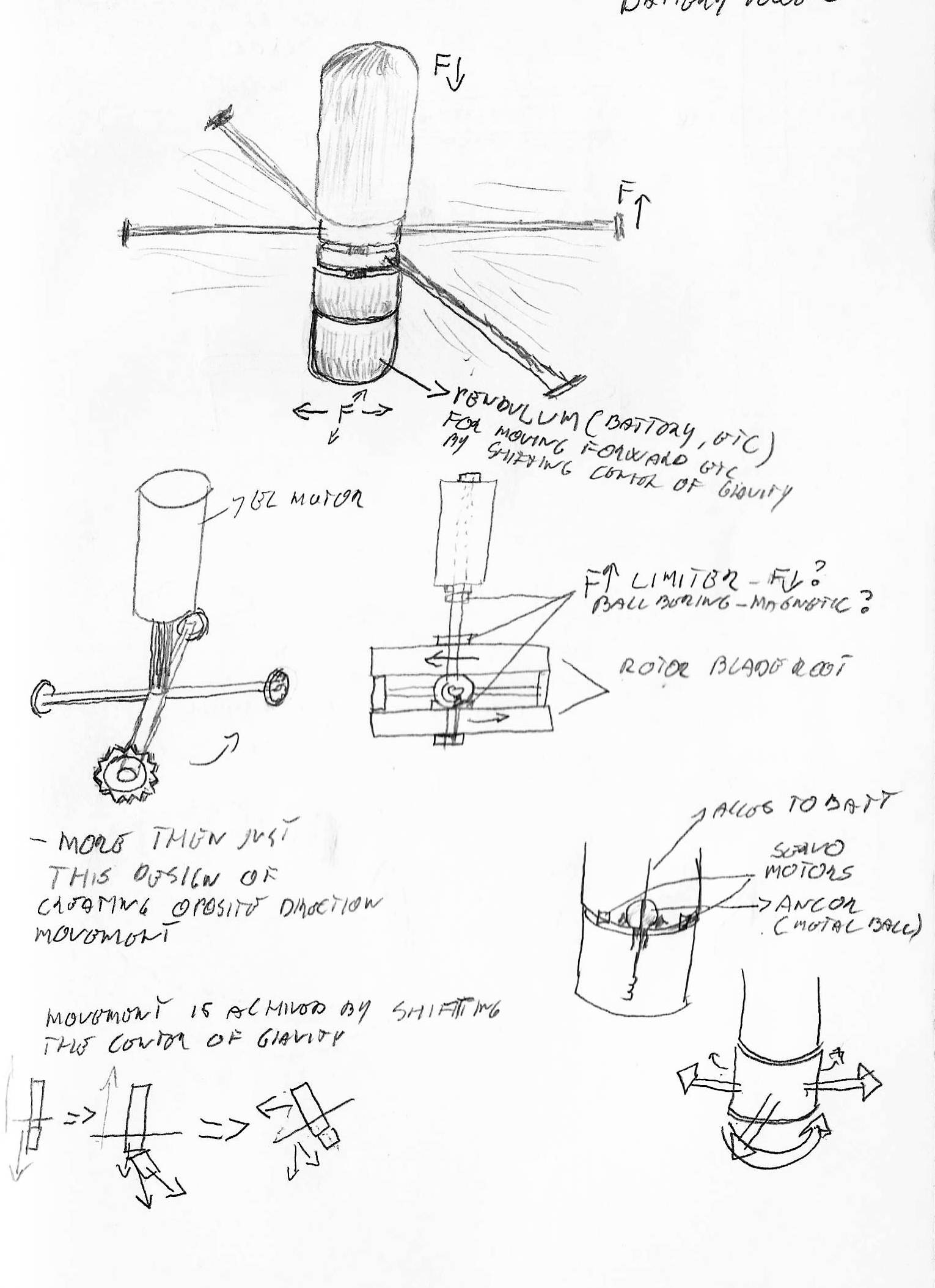
A better approach would be to use an existing weight of battery or camera modules that are suspended like a pendulum and has servos that move it and thus move the Centar of Gravity. I had this idea of a coaxial drone around 2005 and drew a sketch of how I would do it but never got to it. Maybe soon, especially when I found research that uses the same principle which validates my approach. Thats good.
In addition to shifting the Centar of Gravity, there have been successful efforts in creating a variable pitch rotor like big helicopters have without all the mechanical complexity. The primary document for this approach was done by James Paulos and Mark Yim in their 2015 paper Flight Performance of a Swashplateless Micro Air Vehicle.

And was further worked on by amazing YouTuber Tom Stanton in his Drone Helicopter Hybrid video.
This approach would drastically improve the flight characteristics of Coaxial drones.
Coaxial drones typically have a larger payload capacity compared to other types of UAVs. With two sets of rotors, which are much larger than quadrocopters) sharing the load, these drones can lift and transport heavier payloads, making them suitable for applications requiring advanced sensor systems, high-resolution cameras, or specialized equipment.
The rotor speed is lower than that of a multi-rotor, which results in less noise and better silence. And when generating pitch and roll control moments, the main rotor does not need to be accelerated or decelerated frequently, which reduces the energy loss. Especially in the case of large aircraft size, this advantage over multi-rotor will is more obvious.
The propeller can be folded without the complicated folding and locking mechanism of the multi-rotor aircraft arm, and the folded fuselage is more regular and easy to carry and transport.
The main disadvantage of a coaxial twin-propeller compared with a multi-rotor drone is that flight mode is more complex than multi-rotor, which has some challenges in flight control design making it challenging to program.
It was interesting to watch the development of Sprite from Ascent AeroSystems. They launched a successful Kickstarter campaign in 2015 and raised $406,061 for their small Coaxial drone. It was semi opensource with files for 3D printing still available on Thingiverse. But no mechanical or electronic files are available.

Today, they have grown into a proper small drone company with a focus on a more rugged and modular approach tailored for government and military use. Sprite was renamed Spirit.
A proper Open Source version of Sprite is now a Chinese version called TDrone. It was developed almost at the same time as Sprite in 2015. The files can be found on GitHub or at GrabCad.

Maybe I will have to build one to play around with it.
Not sure how to private message, but US Army Rapid Equipping Force said I could submit to whomever I so choose so long as it's not outside US.....as per DTSO...I guess that's sharing ideas too, but not sure. Probably get zapped because some retired colonel, some where did make his star and has a chip on his shoulder...happened once before when I was in...that was a treat...lol.
So just imagine the coaxial design in your post, but ducted...for safer operations around dismounted personnel.....As outlined in this snippet of an essay that I wrote for RDECOM/Army Aviation branch...whatever they call those now..that SUAS mews was generous in letting me publish a portion that was published in Army AL&T ...safety, safety, safety..
https://www.suasnews.com/2011/11/uas-implementation-at-the-platoon-level/
Looks a little familiar, but not 100%. There's a handful of tilt rotor disc concepts and it's a sound design. Did a similar design for Redstone Arsenal in 2010, but the rotors were ducted and was more modular with track bearings mounted on longitudinal axis inside the cylindrical body that controlled forward/aft tilt pitch control. Yaw control was 4 duct internal yaw paddles as seen on coaxial helos for yaw control